IoTの活用範囲が拡大しています。応用分野を超えた数多くの組込み機器がネットを介してつながることで、近未来の私たちの生活や社会活動を支えるCPS(Cyber Physical System)へと進化していきそうです。CPS上では、ユースケースに応じて、多種多様な組込みシステムを自在に組み合わせ、機能連携させながら高度なサービスを提供するようになることでしょう。応用分野が異なり、使われている情報処理技術や通信/インタフェースも様々な組込みシステムを、いかに上手につなげ、1つの大きなシステムとして動かすかが、ITや組込みのエンジニアとっての腕の見せ所となることでしょう。
多くの機能を組み合わせて複雑なシステムを構築する場合、思いつくままに必要な機能を付け加えていったのでは、システム全体を円滑に動かすことはできません。システムの規模が大きくなればなるほど、構成が複雑になればなるほど、システム全体の構想を明確に描いてから、戦略的に機能を組み合わせていく必要が出てきます。CPS時代の組込み機器の開発では、こうした全体戦略を意識した開発手法が求められるようになると思われます。
組込みの未来を先取りする次世代車開発
こうした組込みが向かう近未来の姿を先取りして、多様な電気・電子機器をネットワークでつなぎ、典型的CPSとして機能させるための技術開発が強力に進められている分野があります。自動車分野です。
現在、自動車業界は、世界にモータリゼーションの潮流を生み出した「T型フォード」が登場して以来の「百年に一度」と呼ばれる大変革の真っ只中にあります。「コネクテッド(Connected)」「自動化(Autonomous)」「シェアリング(Sharing)」「電動化(Electric)」という4つの進化軸を総称した「CASE」に沿って、クルマを構成する技術が一新されつつあります。これらの技術開発では、自動車業界が長年にわたって蓄積してきた機械技術の進化だけでは対応できません。最先端の電気・電子技術、さらには人工知能(AI)やIoTといった情報処理を結集させて、クルマを再発明する必要があるのです(図1)。

実は、今現在のクルマにも、極めて数多くの車載電気・電子機器が搭載されています。普通のクルマならば約50台、高級車では100台以上の制御用コンピュータ(ECU)が搭載され、エンジン制御やライトやウインドウなどの駆動、カーナビなどを動かしています。このため、現代のクルマは「走るコンピュータ」と呼ばれることもあります。
これが次世代車では、自動運転システム、電動化に向けたモーターやバッテリーの制御、交通インフラとの通信、さらにはモビリティ・サービスの提供に向けたサービス・プラットフォームなど、これまでのクルマにはなかった多くの新機能が搭載されます。しかも、各機能には相互連携が求められ、これまでとは比べものにならないほど複雑で大規模なシステムになる見込みです。こうした次世代車が目指す姿を、「走るデータセンター」と呼ぶ人も出てきています。
E/Eアーキテクチャを刷新して複雑・大規模化する車載システムに対応
次世代車は、多種多様なデータを扱う様々な情報サブシステムの集合体だと言えます。そして、異質な特徴を持つ高度なサブシステム群を組み合わせ、1つの大きなシステムとして動作させることが求められます。この点こそが、これから本格化するCPSの開発、ひいてはCPS時代の組込みシステム開発を先取りしていると言える理由です。
次世代車の中で、走る・曲がる・止まるといったクルマの基本機能の部分を制御する機能では、徹底した安全性の確保が求められます。ただし、ここで扱うデータの量はそれほど多くはありません。一方、自動運転システムでは、カメラの画像データのような大容量データを扱い、しかもその処理やデータ伝送では高い信頼性やリアルタイム性が要求されます。また、搭乗者が車内で楽しむエンターテインメントを提供するシステムは、扱うデータは大容量ですが、安全性や信頼性に関する要求は他の部分に比べれば厳しくありません。こうした違いを見極めながら、サブシステムに搭載するECUの性能、OSの種類、ネットワーク技術の特徴を決めることになります。
自動車業界では、ECUやセンサー、アクチュエータなどをつないだクルマを構成する大きなシステムの構造のことを「E/Eアーキテクチャ」と呼んでいます。E/Eとは、電気・電子のことです。そして、クルマが走るコンピュータから走るデータセンターへと進化させるため、自動車業界は、このE/Eアーキテクチャを大きく刷新させようとしています。
この刷新のコンセプトやそこで使われる技術の選択からは、将来のCPS時代の組込みシステム開発の参考になる点が多々あるように感じます。
3段階で進化するE/Eアーキテクチャ
世界中の自動車業界の企業は、E/Eアーキテクチャを、3つの段階を経て進化させていくことで合意しています(図2)。
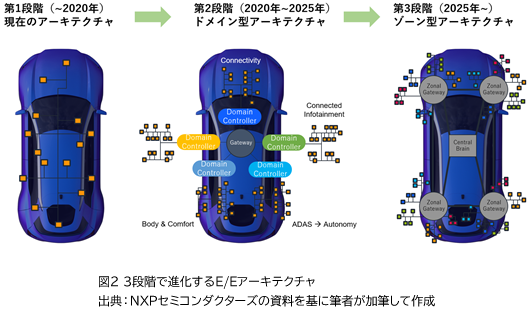
第1段階は現状のアーキテクチャです。とは言いながら、実は、これまでのクルマの開発では、搭載する電装機器を効果的かつ効率的に相互接続させるためのE/Eアーキテクチャという概念が、そもそもありませんでした。電装品の用途ごとに、最も適した機能と性能を持つマイコン、OS、ソフトウエア、ネットワーク技術を選択し、使っていました。そして、ECU間での相互接続が必要になる場合には、1対1で無理矢理接続していました。
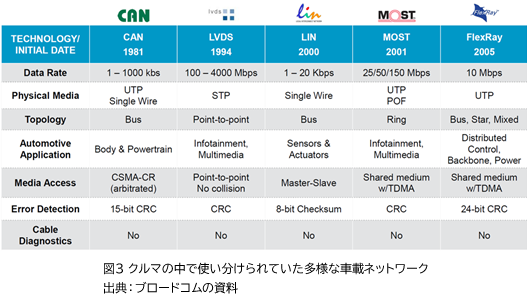
自動車制御の電子化が進むにつれ、相互接続すべきECUや電装品が年々増えてきました。その結果、膨大な数のワイヤーが車内を這い回り、車両重量が増大し、BOMコストや組み立てコストを増大させる要因になってきました。そこで、「CAN」「FlexRay」「MOST」「LIN」といった、車載用に開発した多様なネットワーク技術を投入 (図3)。これによって、少しはワイヤーが整理されました。しかし、用途ごとに別の車載ネットワーク技術を使っていたため、思ったほどすっきりとしたシステム構成にはなりませんでした。組込みシステムの開発でも、用途を見極めて最適な仕様のネットワーク技術やインタフェース技術を賢く使い分けたつもりが、システム全体で見ると必ずしも最適化されていないといった状況があることでしょう。同様のことが、自動車開発で起きていたのです。
第2段階は、これから2020年代前半まで利用することになるアーキテクチャです。この段階では、扱うデータの特徴が似通った処理をいくつかの技術領域(ドメイン)に分類。それぞれの処理内容に合った車載ネットワーク技術でつなぎ、ドメイン内のデータ転送や処理を「ドメイン・コントローラー」で制御しようとしています。システム全体を俯瞰して、戦略的に技術を投入することにしたのです。制御系と情報処理系のように特徴の異なる電装品同士をつなぐ場合には、異質なネットワーク技術の仲立ちとなるゲートウエイを経由します。こうしたE/Eアーキテクチャのことを「ドメイン型アーキテクチャ」と呼びます。
ドメイン型を採用すれば、似通った処理内でのデータ転送の効率が高まり、ワイヤーの数も随分削減できます。ただし、複数のコネクタ形状やケーブル、通信用チップなどが異なる多数のネットワーク技術を使い分ける点は、第1段階から変わっていません。また、同じドメインの電装品であっても、実際にはクルマの様々な部分に散在しているため、ケーブル長は意外と長くなり、これがコスト増や重量の増加の要因となります。
データ転送をEthernetに、処理を中央コンピュータに集約
CASEに沿ったクルマの再発明を見据えて、E/Eアーキテクチャを理想的な形に作り変えるのが第3段階です。完全自動運転車の実用化が見込まれる2025年以降に市場投入されるクルマに採用されることになりそうです。ECUや電装品をつなぐネットワークは、Ethernetに統一します。ただし、Ethernetと言っても、パソコン向けとは異なり、信頼性が高く、軽量で安価なケーブルでのデータ転送が可能な物理層(PHY)を用いる車載Ethernetを利用します。そして、車内の要所にゾーン・ゲートウエイと呼ぶデータ通信を制御する機器を配置。負荷の高い情報処理やシステム全体の制御は、システムの中央に置いた極めて高性能な中央コンピュータに集約します。こうしたE/Eアーキテクチャの最終形態のことを「ゾーン型アーキテクチャ」と呼びます。
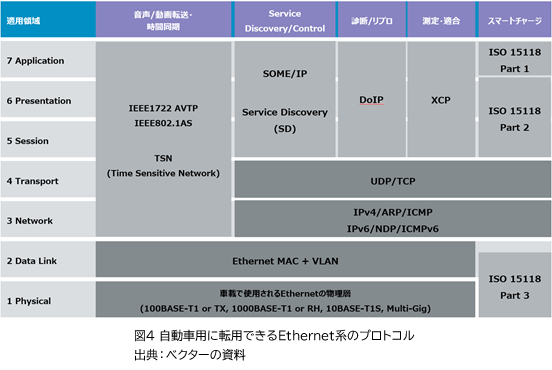
ゾーン型でフル活用することになるEthernetには、自動車以外の様々な分野で豊富な利用実績があります。このため、IT分野で使用されるIPv4/ARP/ICMP、UDP/TCPや、音声や動画の時間同期が可能なAVTPなど、応用分野ごとの要求に合った多様なプロトコルが既にあります (図4)。こうした技術資産を利用し、使い分けることで、リアルタイム性が求められる通信や大容量のビデオ信号の通信、低遅延の通信といった異質な通信を、1本のケーブルに集約できるようになります。その結果、ネットワークの物理的な構成は、極めてシンプルなものになり、同時にユースケースに応じて柔軟にECU間の連携を図ることができるようになります。ケーブルやコネクタなどを大幅に削減し、車両の軽量化も可能です。
また、クルマに実装する様々な機能の処理を中央コンピュータに集中させることで、クルマの機能をソフトウエアの入れ替えで簡単に更新できるようになります。様々な車種、仕向地ごとの仕様の違いをソフトウエアだけで作る分けることも可能になります。最終的には、ネットワークがEthernetに、分散していた情報処理用コンピュータが高性能な中央コンピュータに集約するというのは、システムの進化を考えるうえでとても興味深い事実です。
ゾーン型の実用化を見据え、着々と揃う要素技術
ゾーン型アーキテクチャで利用されている車載Ethernetは、現在の市販車への搭載例はまだ多くはありません。ただし、用途拡大に向けた標準化が着々と進んでいます。
車載Ethernetは、伝送路に軽量で低コストなシールドなしシングル・ツイストペア・ケーブルを利用するPHYについて、2015年には100Mbpsの規格が「IEEE 802.3bw(100BASE-T1)」として、2016年には1000Mbpsの規格が「IEEE 802.3bp(1000BASE-T1)」として標準化されました。そして、2019年中には、10Mbpsの規格が「IEEE 802.3cg(10BASE-T1S(伝送距離15m以下の短距離用)/10BASE-T1L(産業用または伝送距離1km以上の長距離用))」として標準化される見込みです。
なぜ、後になって低速な10Mbpsの技術を標準化するのかと疑問に感じる人もいるかもしれません。実は、この10BASE-T1こそ、ゾーン型アーキテクチャ実現の鍵を握る戦略性の高い技術なのです。この領域のデータ転送は、CANやLINといった従来の車載ネットワークがカバーし、センサーやアクチュエータなどを接続するために使われていました。これらを10BASE-T1に代えることで、IPネットワークをクルマの隅々まで行き渡らせることができます。10BASE-T1では、パケットの衝突を避けるメカニズムが搭載されるなど、センサーでの検知データや制御データの転送を見越した仕様を採用しています。
さらに、2020年には、マルチギガ対応の技術が「IEEE 802.3ch(2.5/5/10G BASE-T1)」として標準化される予定です。
ネットワーク層よりも上位のプロトコルでも、車載Ethernetの利用シーン拡大を後押しする技術の標準化が進んでいます。最も注目できるのは、先進運転支援システム(ADAS)や自動運転に向けた車載ネットワークに求められる機能をEthernetに付加する技術として標準化が進められている「TSN(Time Sensitive Network)」です。TSNは、音声と映像の伝送に向けた標準である「IEEE 802.1 AVB」から発展させた、時刻同期と低遅延での伝送を可能にする技術です。エンターテインメント系のデータ伝送をしている場合でも、ブレーキの制御データのような優先度の高いトラフィックを確実に送ることができます。
セキュリティと既存資産活用に向けて仮想化技術をフル活用
システム構成が随分とシンプルになるゾーン型ですが、解決すべき新たな懸念材料が浮上してきます。
ひとつは、データ転送を車載Ethernetに集約させることで、あらゆる車載機器が外部インターネットにつながってしまうことです。これは、クルマの全機能がサイバー攻撃の対象になり得ることを意味します。また、クルマの一部に不具合や故障が発生した場合、それが安全性に関わる機能にも伝搬する可能性もあります。
また、既存のソフトウエア資産を活用できなくなる点も問題です。自動車メーカーは、特定のOS上で動くことを想定したソフトウエア資産をたくさん保有しています。そうしたソフトウエア資産の中には、CANなど従来の車載ネットワークを使うことを前提に開発されたものが多くあります。このため、利用するネットワーク技術を車載Ethernetに変える際には、ソフトウエアを再設計する必要があるのです。制御ソフトウエアなどは自動車メーカーのノウハウの結晶であり、実績を積んだソフトウエアはできる限り、そのまま使いたいと考えています。
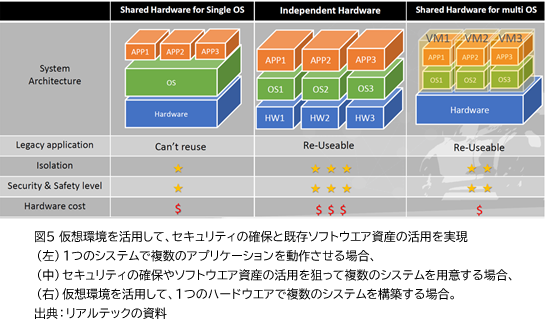
こうした新たな課題も、何種類ものハードウエアやOSを同時に搭載すれば解決できます。しかし、そうした方法では、コストが掛りすぎ、システム構成も肥大化してしまい非現実的です。そこで、ゾーン型を採用する際の課題を解決するための技術として、仮想化技術をフル活用することが検討されています。大きく2つの部分の仮想化が想定されています。
まず、1つのマイコン上に複数のOSを搭載する仮想化技術を投入します(図5)。この方法ならば、コストを最小限に抑えながら、OSレベルでのシステム分離が可能になります。これによって、セキュリティを確保し、同時に過去のソフトウエア資産も活用できるようになります。たとえ一部の仮想環境がクラッシュしても、他の仮想環境に影響が及ぶことはなく、正常に動作し続けることができます。
さらに、システムのI/Oも仮想化します。これは、既存の車載ネットワークにつながることを想定したソフトウエア資産をそのまま利用することを目的としたものです。マイコンとNIC(Network Interface Card)をつなぐI/Oを仮想化して、仮想的なNICをNICカード上に構築します。マイコンとNICの間をPCI Express (PCIe)でつなぎ、シングルルートのI/O仮想化で複数の高速データ転送をサポートできる技術が実現しています。
テクノロジードライバの資産をいかに生かすか
ここまで次世代車の実現に向けたE/Eアーキテクチャの刷新の動きを紹介してきました。ぜひ、知っておいて欲しいことは、巨大産業である自動車産業が、世界中の総力を結集してこうした技術革新を着々と進めているということです。開発には巨額の資金と多くの研究開発リソースが惜しみなく投入されています。
自動車産業は、高性能、高信頼性、高品質、低コスト、小型・軽量化、さらにはグローバル化への対応や多品種展開への容易さなど、ありとあらゆるシステム要求が高レベルで同時に求められる極めて厳しい産業です。ここで生まれた技術は、ファクトリーオートメーションやロボット、医療機器、産業インフラなど多くの分野でも活用できることでしょう。
おそらく、数年後のロボットは、ゾーン型アーキテクチャをそのまま転用したような内部構造を採ることになることでしょう。なぜならば、ゾーン型向けの半導体やソフトウエア・コンポーネント、開発ツール、さらには効果的な設計手法などエコシステムをそのまま利用できるからです。車載用半導体のメーカーはおしなべて、同じ技術を他分野に展開してより大きな市場を獲得する事業シナリオを描いています。現在の自動車業界の技術開発動向をつぶさにウォッチすると、将来の組込みシステム開発で活用すべき技術をありありと知ることができるのです。
-
- 第1回 組込みシステムのこれから
- 第2回 IoTの成功はセキュリティ次第
- 第3回 組込みでもGPUやFPGAと早めに親しんでおこう
- 第4回 電子産業の紅白歌合戦、CEATECで垣間見えた未来
- 第5回 小口開発案件の集合市場、IoTの歩き方(上)
- 第6回 小口開発案件の集合市場、IoTの歩き方(下)
- 第7回 徹底予習:AI時代の組込みシステム開発のお仕事
- 第8回 いまどきのセンサー(上):ありのままの状態を知る
- 第9回 いまどきのセンサー(下):データを賢く取捨選択する
- 第10回 組込みブロックチェーンの衝撃(上)
- 第11回 組込みブロックチェーンの衝撃(下)
- 第12回 エネルギーハーベスティングの使い所、使い方
- 第13回 「人を育てる」から「道具を育てる」へ、農業から学ぶAI有効活用法
- 第14回 CPS時代に組込みシステム開発に求められることとは
- 第15回 次世代車のE/Eアーキテクチャに見る組込みの進む道
- 第16回 RISC-Vが拓く専用プロセッサの時代
- 第17回 振動計測の大進化で、熟練エンジニアのスキルを広く身近に
-
- 零の巻:組込みというお仕事
- 壱の巻:2進数と16進数を覚えよう!
- 弐の巻:割り込みとポーリング
- 参の巻:printf()が使えない?
- 四の巻:これにもIntelが入ってるの?
- 五の巻:Endianってなに?
- 六の巻:マルチタスクとは
- 七の巻:スタックってなあに?(1)
- 七の巻:スタックってなあに?(2)
- 八の巻:メモリを壊してみましょう
- 九の巻:コードが消える?~最適化の罠~
- 拾の巻:例外が発生しました
- 拾壱の巻:コードサイズを聞かれたら
- 拾弐の巻:キャッシュは諸刃の剣
- 拾参の巻:デバイスにアクセスするには
- 拾四の巻:セキュリティってなに?(1)
- 拾四の巻:セキュリティってなに?(2)
- 拾四の巻:セキュリティってなに?(3)
- 拾五の巻 :DMA対応と言われたら(1)
- 拾五の巻 :DMA対応と言われたら(2)
- 拾六の巻:ヒープとスタック
- 拾七の巻:フラグメンテーション
- 拾八の巻:CPU起動とブートローダ
- 拾九の巻:kmとKByteの「kとK」
- ビリーへの質問:DMAとキャッシュの関係
- ビリーへの質問:スタックオーバーフローについて
- ビリーへの質問:CPUレジスタについて