概要
「ROS(Robot Operating System)」とは、世界的に利用されている知能ロボット開発用のオープンソースのミドルウェアです。 2007年に米WillowGarage社がスタンフォード大学での研究をベースにしたものをオープンソースとして公開をしてから世界中の研究者、開発者が参加して開発が続けられており、既に4000以上の開発物を利用することができます。
元々は学術界で広く利用されていましたが、近年では、産業界からも大きく注目されており、ロボット開発の世界標準となっています。
特徴
「ROS」においては、機能ごとにモジュール分割された多数のプロセスが相互に通信をする分散処理系を構築します。
様々なロボットやセンサがROSに対応しているだけでなく、
- 移動ロボットの自律移動に必須の機能であるSLAM※やナビゲーション
- 多軸アームの制御に必要なモーションプランニング
の機能が既に再利用可能な形で公開されています。
ユーザー様は自由にこれらの開発物を組み合わせて利用することで、「車輪の再発明」を行うことなく、自身の課題解決へフォーカスすることができ、開発時間の短縮が実現可能となります。
現在、「ROS」の基盤機能を強化した「ROS2」の開発が進められております。従来の「ROS1」ではあまり得意ではなかったリアルタイム制御や組込みへの対応が実施されており、各界からより一層の注目を集めております。
- SLAM:Simultaneous Localization And Mapping、環境内を移動して自己位置を推定しながら環境地図を作成する技術。
ロボットやドローンの自律移動に必須の機能の一つ。
採用事例
事例動画「ROS応用自動搬送フォークリフト」
ROXBLOCK「ROS専用プラットフォーム」
- ROXBLOCKは、ROSにおける各「node」をハードウェアモジュール化させることで並列分散環境を提供する”ROS専用プラットフォーム” として開発されました。
ハードウェアレベルで並列動作することで、より高速で安定したロボットシステムを構築することが可能になります。
また、ROSが動作する外部のPCを結合してシステムを構築するだけでなく既存のROSシステムとも共存できます。 - ROXBLOCKの各モジュールは、ROSにおけるnodeと等価で 「ROS Topic/Service」によって動作します。
ROS と ROXBLOCK の概念図
左が通常の ROS 環境、右が ROXBLOCK を表します。
ROXBLOCK は、ハードウェアレベルでの並列分散環境を提供します。

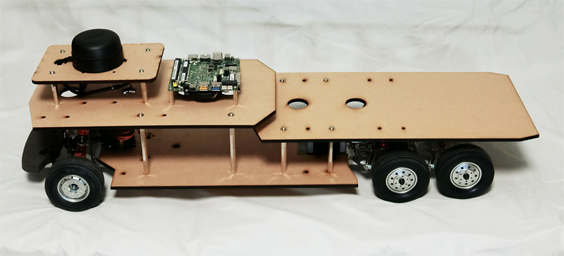
自動運転ソリューション
近年の「自動運転車の開発」という課題に対してスケールモデルを利用したシミュレータを提案します。
- 機能
- SLAM: 自己位置推定、環境地図作成
- WayPoint走行
- レーンキープ
- 自動駐車
- 前車追従
- 障害物緊急停止
- 全方位モニター
- 仕様
- 1/12スケール
- 駆動:ステッピングモータ
- 電源:DC24V
- 上記の事例は、プロダクトとしての販売も可能です
- その他、ROSを使った受託開発も行います。詳細はお問い合わせください
[開発元]合同会社インテリジェント・ロボット・テクノロジー
※記載されている製品・システム名は、各社の商標または登録商標です。
に関するお問い合わせ